March 23, 2021. I turn the old joke about interesting numbers into a
proof that most real numbers are indescribably boring. In turn, this implies
that there is no explicit well-ordering of the reals. The axiom of
choice, however, implies all are relatively interesting.
Introduction
It’s a
running joke
among mathematicians that there are no boring numbers. Here’s the
proof. Let $B$ be the set of boring numbers, and suppose for a
contradiction it is non-empty. Define $b = \min B$ as
the smallest boring number. Since this is a highly unusual property, $b$ is
interesting after all!
Joke it may be, but there is a sting in the tail. By thinking
about how the joke works, we will be led to some rather deep (and
perhaps disturbing) insights into set theory and what it can and
cannot tell us about the mathematical world.
Integers and rationals are interesting
The joke implicitly uses the fact that “numbers” refers to “whole numbers”
\[\mathbb{N} = \{0, 1, 2, 3, \ldots\}.\]
If it didn’t, then the minimum we used to get our contradiction
wouldn’t always work!
For instance, say we work with the integers
\[\mathbb{Z} = \{\ldots, -2, -1, 0, 1, 2, \ldots\}.\]
The set of boring integers $B_\mathbb{Z}$ may be unbounded below.
Does this cause a problem? Not really. We can just define the smallest
boring number as the smallest element minimising the absolute value, i.e.
\[b = \min \text{argmin}_{k\in B_\mathbb{Z}} |k|.\]
(The $\text{argmin}$ might actually give us two numbers, $\pm b$, so the negative one
is the smallest.) Thus, there are no boring integers.
What about boring rational numbers?
This is somewhat more elaborate, but if $B_\mathbb{Q}$ is the set of
boring rationals, we can define the “smallest” boring number as
\[b = \min \text{argmin}_{a/b\in B_\mathbb{Q}} (|a| + |b|),\]
where $a/b$ is a fraction in lowest terms.
Once again, there may be multiple minimisers of $|a| + |b|$, but only
a finite number, so we can choose the smallest.
We conclude there are no boring rationals.
This pattern suggests there are no boring real numbers.
We should be able to find some function with a finite number of
minima, and then choose the smallest, right?
I’m going to argue that no such function can ever be described. Then I’m
going to explain why it might exist anyway, depending on which axioms of set theory we use!
Most real numbers are boring
“Boring” and “interesting” are subjective.
We’ll use something a tad more well-defined, and replace
“interesting” with describable.
A number is describable if it has some finite description, using
words, mathematical symbols, even a computer program, which uniquely singles out that number.
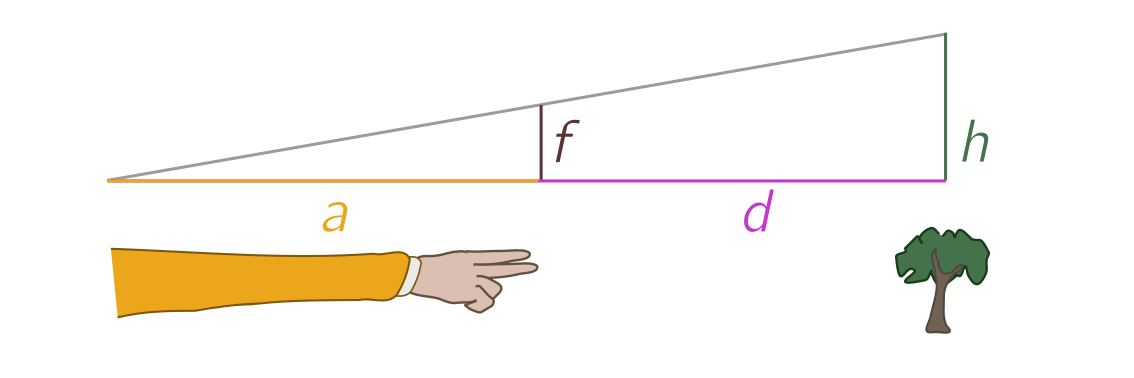
For instance, $\sqrt{2}$ is the positive solution of $x^2 = 2$, $\pi$
is the ratio of a circle’s circumference to its diameter, and $e$ is
the limit
\[e = \lim_{n\to\infty} \left(1 + \frac{1}{n}\right)^n.\]
It turns out that almost every real number is indescribable, or
“boring”, in our official translation of that term.
The argument is very simple, and proceeds by simply counting the
number of finite descriptions.
Each such description consists of a finite sequence of symbols
(letters, mathematical squiggles, algorithmic instructions), each of
which could be elements of some very large alphabet of symbols.
For instance, the text
\[\sqrt{2} \text{ is the positive solution of $x^2 = 2$.}\]
can be converted into (decimal) unicode as
8730 50 32 105 115 32 116 104 101 32 112 111 115 105 116 105 118 101
32 115 111 108 117 116 105 111 110 32 111 102 32 120 94 50 61 50 46
Imagine some “super unicode” which lets us converts any symbol
into a number.
The super unicode alphabet may be arbitrarily large, so we will take it to
consist of every natural number $\mathbb{N}$.
Then a finite description using any symbols can be written as a sequence of
the corresponding natural numbers, a trick I will call “unicoding”.
To find the number of finite descriptions, we just count the sequences!
There is a nice scheme for showing that these are in one-to-one
correspondence with the natural numbers themselves, and hence
countably infinite.
We take a sequence, say
\[(6, 2, 0, 5)\]
and convert the first bracket and all commas into $1$s, and each number into
the corresponding number of $0$s:
\[10000001001100000_2.\]
In turn, this can be converted to decimal, $66144$.
Going in the other direction, any whole number can be written in
binary and then converted into sequence:
\[14265092 = 110110011010101100000100_2\]
becomes $(0,1,0,2,0,1,1,1,0,5,2)$.
Thus, we have a simple, explicit correspondence between finite
sequences of natural numbers and the natural numbers themselves.
This basically completes the proof, for the simple reason that there
are infinitely more real numbers than there are natural numbers.
This is established by Cantor’s beautiful
diagonal argument,
which I won’t repeat here.
The upshot is that, via unicoding and then the binary
correspondence, finite descriptions can only capture an
infinitesimally small fragment of the real numbers.
Most literally cannot be talked about.
The set $B_\mathbb{R}$ includes almost every real number, though
quite definitely not every real number you can think of.
But, armed with our previous jokes, it’s tempting to think that we can
waltz in and make the same joke about $\mathbb{R}$, simply
plucking out the smallest element of $B_\mathbb{R}$.
Of course, that won’t quite work, because the set need not be bounded
below. So instead, suppose there is some explicit function $f$ such
that $b \in B_\mathbb{R}$ is the smallest minimizer of $f$, i.e.
\[b = \min \text{argmin}_{x \in B_\mathbb{R}} f(x).\]
If I knew $f$ explicitly, we’d have a description of $b$ after all. Contradiction!
But the contradiction here does not imply $B_\mathbb{R}$ is
non-empty. After all, most of $\mathbb{R}$ is indescribable for
simple set-theoretic reasons.
Instead, it means that there cannot be any explicit function
$f$. More generally, there cannot be any explicit rule which, given a
subset of $\mathbb{R}$, gives some unique number. If there
was, we could apply it to $B_\mathbb{R}$ and get the same
contradiction.
(See Appendix A for discussion of the related Berry paradox.)
An existential aside
There’s a loophole here. Our argument doesn’t establish that
$f$ doesn’t exist, just that it has no finite description. And
although it might seem weird to trust in the existence of something
that we can’t really talk about, we do just this with the real
numbers!
I believe in all the real numbers, even the ones I can never describe.
Is this reasonable?
It depends who you ask.
There is a philosophy of mathematics called
intuitionism which
tells us that mathematics is a human invention, and therefore enjoins
us to only reason about the things we can construct ourselves. No
indescribable real numbers if you please!
I’m not sure about this “mathematical creationism”, and think there
are more things in the mathematical heavens than are dreamt of in
our finite human philosophy.
Why should human limitations be mathematical ones?
That said, it’s not the case that anything goes. We should have some
firm basis for believing in the existence of those things we can’t
discuss, and for the real numbers, the firm basis is drawing a
continuous line on a piece of paper, or thinking about infinite
decimal expansions. These are models of the real numbers,
concrete-ish objects which capture the essence of the abstract entity
$\mathbb{R}$. They convince us (or at least me) that there is nothing
magical stopping someone from drawing certain points on the line, or
continuing certain expansions forever.
Similarly, the indescribable things we would like to exist and reason
about in set theory might depend on our models of set theory!
I won’t get into the specifics, but an important point is there are
many different models of set theory, with different properties, and
it seeks unlikely that any one model is right.
These properties are abstracted into axioms, formal rules about what
exists and what you can or can’t do with sets.
Because models of set theory are deep, highly technical constructions,
most of the time we go the other way round, and play around with
axioms instead. Only later do we go away and find models which support
certain sorts of behaviour.
The point of all this is to make it a bit less counterintuitive when I
say that the existence and properties of boring numbers depend on which axioms
we decide to use.
All real numbers are relatively interesting
So, let’s return to our problem of boring real numbers.
We argued there was no explicit, finitely describable rule for picking
an element out of $B_\mathbb{R}$.
But we can always make the existence of such a rule — describable
or not — an axiom of our theory!
There are two ways to go about doing this.
Note that in the first example of boring natural numbers, we use the
minimum of the set.
We had to be a bit more clever with the integers and rationals, but it
essentially boiled down to creating a special sort of ordering on
the set, so that any subset (including the boring numbers) has a
smallest element.
We wrote this is in a complicated way as
\[b = \min \text{argmin}_{x \in B} f(x)\]
for some function $f$, but we could just as well write
\[b = \min_{\mathcal{W}} B,\]
where $\mathcal{W}$ denote this ordering on the big set.
To be clear, for the integers it is
\[0, -1, 1, -2, 2, -3, 3, \ldots\]
and for the rationals it is
\[0, -\frac{1}{1}, \frac{1}{1}, -\frac{2}{1}, -\frac{1}{2}, \frac{1}{2},
\frac{2}{1}, \ldots.\]
This is called a well-ordering. Although it may not be describable,
we could simply require, as an axiom of set theory, that any set can
be well-ordered! More explicitly,
Any set $A$ has a well-ordering $\mathcal{W}_A$ such that any subset
of $A$ has a unique minimum element with respect to $\mathcal{W}_A$.
Although it doesn’t spoil our conclusion that most real numbers are
boring, such an axiom would allow us to turn the old joke into an
argument that all real numbers are relatively interesting, where
“relatively interesting” means that there is a finite description
where we are allowed to use the well-ordering $\mathcal{W}$.
The proof goes as you might expect: let $B^{\mathcal{W}}_\mathbb{R}$ be the set of relatively boring
numbers, i.e. numbers with no finite explicit description, even when
allowed to use the well-ordering $\mathcal{W}$.
Since $\mathcal{W}$ is a well-ordering, we can define
\[b = \min_{\mathcal{W}} B^{\mathcal{W}}_\mathbb{R}.\]
End of proof!
So, although most real numbers are strictly boring, with a
well-ordering all of them are relatively interesting.
Choosing an order
Well-ordering is not usually treated as an axiom.
Historically, set theorists prefer to use a simpler rule called the
axiom of choice, which is logically equivalent, as we will argue
informally in a moment, but somehow less suspect.
As Jerry Bona joked,
The axiom of choice is obviously true and the well-ordering principle
obviously false.
(Actually, Bona’s joke mentions a third equivalent form called Zorn’s
lemma, but it would confuse matters too much to explain.)
Loosely, the axiom of choice just says we can pick an element from a
non-empty set. Pretty reasonable huh? If a set is nonempty, it has an element, so
we can pluck one out.
In fact, it’s usually stated in terms of a family of sets $A_i$,
where the subscript $i$ ranges over some indexing set $I$:
Given a family of nonempty sets $A_i$, $i \in I$, we can collect a
representative from each set, labelled $f_i \in A_i$.
The well-ordering principle implies the axiom of choice, since I can
just take the union of all the sets $A_i$, well-order it with
$\mathcal{W}$, and then define $f_i = \min_{\mathcal{W}} A_i$.
That’s my set of representatives!
The other way round is conceptually straightforward.
To well-order a set $A = A_0$, start by choosing an element $f_0 \in
A_0$ by the axiom of choice. Then remove it to define a new set $A_1 =
A_0 - \{f_0\}$, and select another element $f_1 \in A_1$. Continue in
this way, at each stage simply deleting the element from the previous
stage and choosing a new one, using
\[A_{n+1} = A_n - \{f_n\} = A_{n-1} - \{f_n, f_{n-1}\} = \cdots = A_0 -
\{f_i : i < n\}\]
as long as the set is nonempty.
The well-ordering is simply the elements in the order we made the
choice:
\[\mathcal{W}_A = \{f_0, f_1, f_2, \ldots \} = \{f_n \in A_n : A_n \neq \varnothing\}.\]
There are two issues with this construction.
The first is that it might feel sketchy to use the axiom of
choice “as we go” to build the sets, rather than starting with a
pre-defined family. But no one said this wasn’t allowed!
Second, our method only seems to work for sets as most as large as the
natural numbers, since we indexed elements with $n \in \mathbb{N}$.
But we can extend it to an arbitrary set using a generalisation of
natural numbers called
ordinals.
We loosely sketch how this is done in Appendix B.
Once the dust settles, we find that the axiom of choice is equivalent
to well-ordering.
Conclusion
The overarching theme of this post is how much mileage we can get
from a bad joke.
The answer: quite a lot!
We learned not only that there are no boring integers and rational
numbers, but via a simple counting argument, that the vast majority of
real numbers are indescribably boring.
This is equivalent to having no explicit way to well-order the reals.
On the other hand, by giving ourselves the ability (via the axiom of
choice) to pluck elements at will from non-empty sets, we are able to
supply the reals with a well-ordering. So, all reals are relatively
interesting, even if we can’t talk about them.
Acknowledgments
As usual, thanks to J.A. for the discussion which led to this
post, and also for proposing an elegant mapping analogous to unicoding.
Appendix A: the Berry paradox
Consider the phrase
The smallest real number with no finite, explicit description.
If “smallest” refers to an explicitly definable well-ordering of the
reals, then this would seem to pick out a unique number with a finite,
explicit description. Contradiction!
We used this to argue no explicit well-ordering exists.
But let’s compare this to the
Berry paradox, which
asks us to consider the phrase
The smallest positive integer not definable in under sixty letters.
This phrase clocks in at under sixty letters, and would seem to define a
number.
Contradiction!
Since “smallest” here makes perfect sense (we are dealing with positive
integers), to resolve the Berry paradox, we must assume either (a)
there is no set $B$ of numbers not definable in under sixty letters,
analogous to the original boring number joke, or (b) Berry’s phrase
somehow fails to define a number.
The most popular solution seems to be (b), on the grounds that
referring to the set makes it some kind of “meta-definition”, rather
than a definition per se.
Of course, this seems be committed to a very specific notion of
“definition”, but the problem persists if we replace “definable” with
“meta-definable”, since the smallest non-meta-definable number is
really a meta-meta-definition.
Let $B^{(0)}$ be the set of numbers not definable in under sixty letters,
$B^{(1)}$ the numbers not meta-definable in under $70$ letters, and in
general, $B^{(n)}$ the numbers not meta${}^{(n)}$-definable in under
$60+10n$ letters.
We call any number in the union of all these sets $\mathcal{B} =
\cup_{n\geq0} B^{(n)}$ “lim-definable”.
This is closed under the operation of going meta.
Now consider the phrase
The smallest positive integer not finitely lim-definable.
Since lim-definability is closed under going meta, as is “finite”,
this is now a definition at the same level.
Option (b) is no longer available to us, so only option (a)
remains, and it follows that, like the joke that began it all, all
positive integers are finitely lim-definable.
This is of course obviously true.
Our argument against an explicit well-ordering is very closely related
to the Berry paradox.
The point of considering lim-definability is that we can build the same
descriptive hierarchy for the real numbers, take the union, and rule
out option (b). This leaves two ways to avoid a contradiction: no
lim-definable ordering exists (involving some finite but unbounded
number of references to sets in the hierarchy), or like the Berry
paradox, every real is lim-definable.
But unlike the positive integers, we know from set theory that the
second option can’t be true!
We still have a countable number of lim-definitions, as we can argue
from unicoding.
So there must be no lim-definable ordering of the reals, and no
explicit well-ordering in particular.
Appendix B: ordinals and the axiom of choice
Ordinals are sets which we use to stand in for numbers.
The smallest ordinal is $0$, which is defined as the empty set
$\varnothing = \{\}$.
Each ordinal $\alpha$ has a unique successor $\alpha + 1$, defined by
simply appending a copy of $\alpha$ to itself:
\[\alpha + 1 = \{\alpha, \{\alpha\}\},\]
To illustrate, we apply the successor operation to $0 = \varnothing$ a
few times:
\[1 = 1 + 0 = \{0\}, \quad 2 = 1 + 1 = \{0,
1\}, \quad 3 = 2 + 1 = \{0, 1, 2\}.\]
Going on in this way gives us all the finite ordinals, but there are
also infinite ordinals. The smallest infinite ordinal, conventionally
denoted $\omega$, can be identified with the natural numbers:
\[\omega = \{0, 1, 2, 3, 4, \ldots\}.\]
It is called a limit ordinal since it is not the successor of any
finite ordinal. It is bigger than all the finite ones, $n <
\omega$. The successor is defined as before,
\[\omega + 1 = \{\omega, \{\omega\}\},\]
thereby giving a precise meaning to “infinity plus one”!
We won’t say more about the structure of these ordinals. The main
point is that we can always “count” the elements in a set $A$ using
ordinals, no matter how big it is.
Let’s now return to the problem of proving the axiom of choice
implies that any set $A$ can be well-ordered.
The basic idea is to start with $0$, but keep on counting up “past
infinity”, defining
\[A_{\alpha+1} = A_0 - \{f_\beta : \beta < \alpha\}\]
for any ordinal $\alpha$. The resulting set of
representatives, labelled by ordinals, is
\[\mathcal{W}_A = \{f_\alpha \in A_\alpha: A_\alpha \neq
\varnothing\},\]
with $f_\alpha < f_\beta$ just in case the ordinals $\alpha < \beta$.
This is a well-ordering since the cardinals are themselves
well-ordered.
Now, we’ve skipped many important technical details, but the main
point was that the argument looks pretty similar to the previous one!
]]>